DISEÑO MODULAR
De la evaluación de conceptos elegimos el CONCEPTO 1
ESPECIFICACIONES DEL CONCEPTO ELEGIDO
Para modelar el concepto, usaremos el siguiente boceto (no es el modelo final) que nos permitirá explicar los módulos planteados y sus posibles ubicaciones en el dispositvo
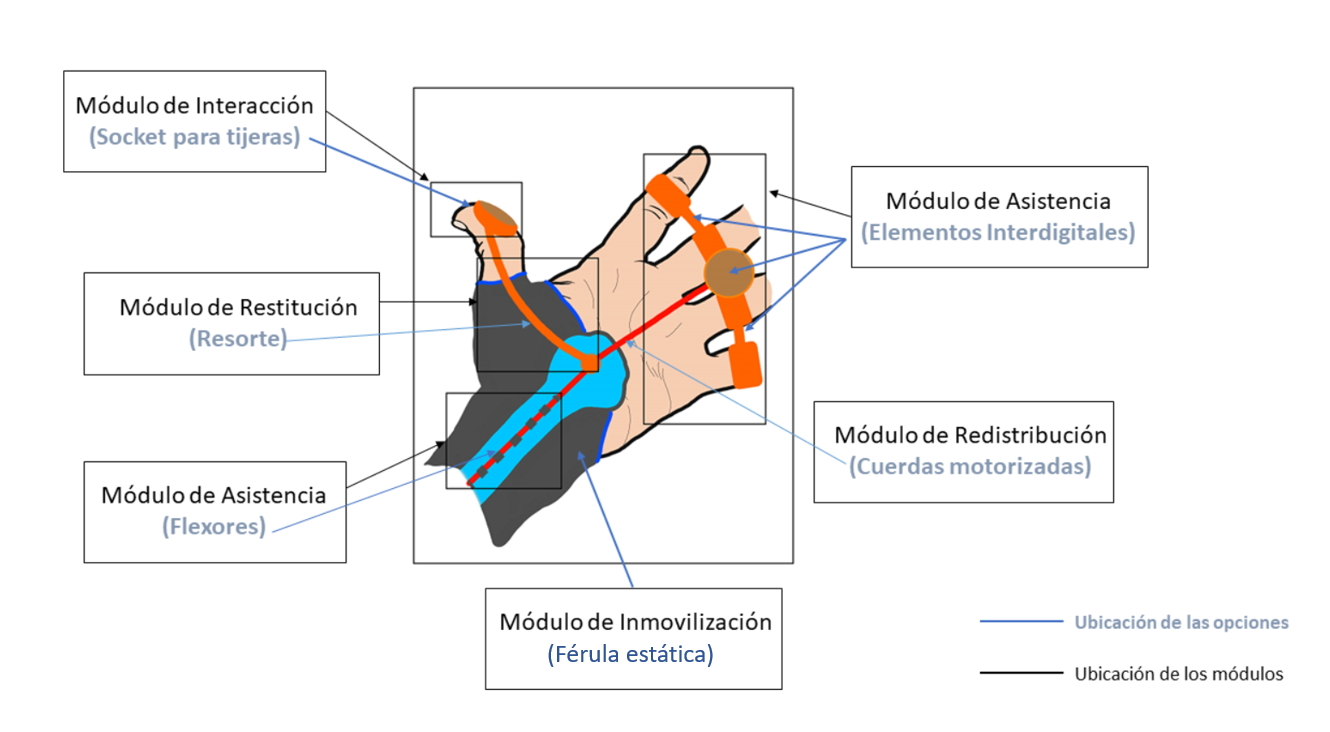
Boceto Concepto Final
Algunos módulos aún no tienen una ubicación definida (en el boceto usamos el cuadro negro para proponer su posible ubicación), los módulos unidos con flechas azules, sí la tienen
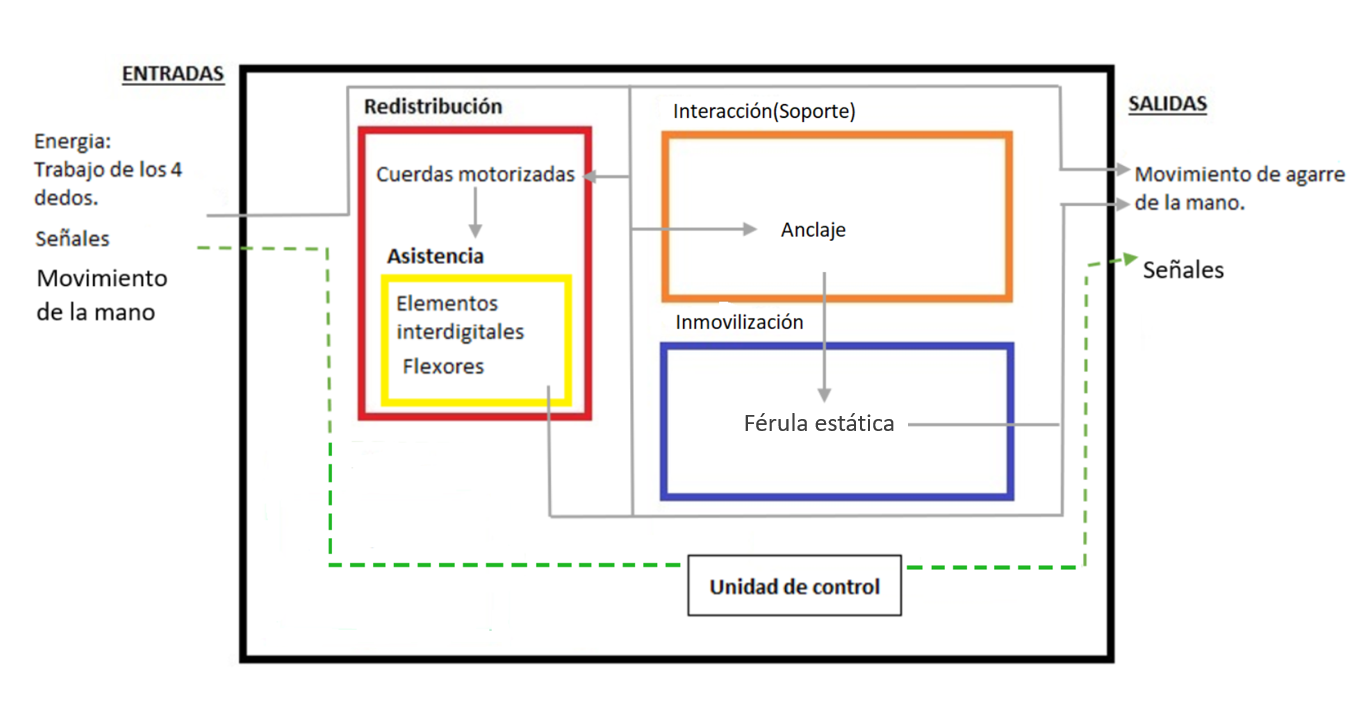
Módulos Principales
Módulo de Interacción: Consiste en un socket para la tijera que utilizará el usuario. Esto permitirá sostener la tijera sin incomodidad, para esto el socket será adaptable y ajustable según el usuario.
Módulo de Inmovilización: Consiste en la férula dinámica que inmovilizará parcialmente al pulgar, solo se bloquearán los movimientos de abducción y tensión. El tercer falange del dedo pulgar, quedará libre para poder utilizar el módulo de interacción.Módulos Secundarios
Módulo de Redistribución: Para evaluar el funcionamiento de este módulo, fundamentamos las fuerzas a utilizar bajo el criterio de la siguiente tabla: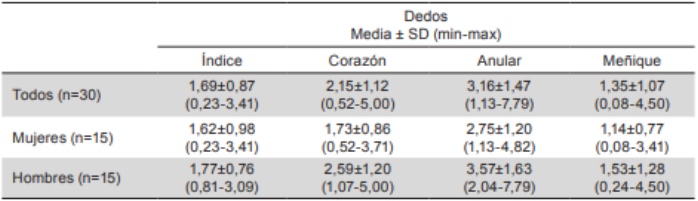
La tabla muestra las medias y desviaciones de la fuerza de cada dedo, a excepción del pulgar, basado en una prueba de Fuerza Máxima Voluntario (FMV), para el dispositivo usaremos los valores obtenidos para Mujeres. (Maradei Garcia,María Fernanda et al. Revista de Salud Pública(2016), 18 (6):935)
Módulo de Asistencia: Para poder medir las fuerzas, usaremos flexores, los cuales basados en los valores de la tabla anterior, activarán el mecanismo de redistribución para no generar lesiones. Sumado a esto, el movimiento generado por el mecanismo de redistribución debe ser correctamento aplicado, para esto usamos los elementos interdigitales (uniones entre los dedos), los cuales son las bases de apoyo, esto no generará lesiones.




