Contexto
¿Qué se ha hecho?
Avances tecnológicos con respecto al tema
Actualmente se han desarrollado dispositivos capaces de rehabilitar la muñeca de una persona en poco tiempo. Estos nuevos prototipos van desde la fabricación de ortesis en impresión 3D hasta rehabilitación mediante realidad virtual.
1. Virtual Rehabilitation System for Fine Motor Skills Using a Functional Hand Orthosis
Es un programa de realidad virtual que se desarrolla en ambientes cómodos. Posee un sistema de modelamiento 3D que permite al usuario (Paciente) seguir ciertos ejercicios de rehabilitación que el software, mediante una ortesis personalizada, va analizando el rendimiento y deficiencias en el movimiento. Esta recopilación de datos es procesada por el programa y mediante algoritmos matemáticos realizan movimientos forzados en la mano del paciente. También este “feedback” ayuda al software a generar nuevos movimientos y ejercicios de rehabilitación acorde a la lesión del paciente.
VENTAJAS:
- Optimización de recursos, infraestructura y personal.
- Brinda la posibilidad de que el paciente realice movimientos que en un ambiente clínico no son permitidos, ayudando a que se sienta en mayor comodidad con el entorno de realidad virtual.
DESVENTAJAS:
- El software es dependiente de todo un sistema compacto entre una PC, lentes de realidad virtual, prototipo de ortesis, cableado, etc; por lo que es dificil de movilizar a otros lugares.
- Costo extra de dichos equipos complementarios

Sistema del dispositivo
2. DULEX-II para rehabilitación de muñeca
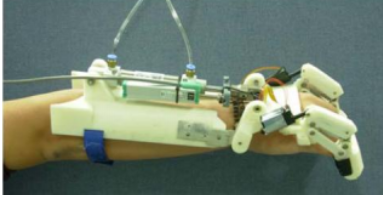
El dispositivo Dulex-II es un exoesqueleto de rehabilitación activa de muñeca que presenta un modelo que funciona neumáticamente rehabilitador de muñeca (2012). Su sistema de control permite realizar movimientos con 3 grados de libertad para la muñeca, el dedo índice y un mecanismo que encierra a los otros tres dedos.
VENTAJA: Ser de soporte para la recuperación del movimiento general de la muñeca
DESVENTAJA: Al ser una ortesis, es un modelo estándar y no personalizable al miembro del paciente.
3. Robot PUPArm
FUNCIONAMIENTO: Es un dispositivo planar, accionado por motores neumáticos que trabajan en dos dimensiones, permiten rehabilitación neuromuscular de los miembros superiores.
APLICACIÓN: Neurorehabilitación mediante interacción sujeto-máquina en tiempo real. Además permite almacenar parámetros como p.ej. posición, velocidad y fuerzas aplicadas para una mejor evaluación del paciente.
DESVENTAJAS:
- Necesidad de un fisioterapeuta como supervisor.
- El uso no es cómodo para el paciente por su diseño

4. Órtesis mecatrónica para terapias en pacientes con lesiones neuromusculares de mano.
Es un prototipo de una estructura para una órtesis mecatrónica activa de mano derecha con la finalidad de realizar el movimiento de pinza gruesa que apoya al paciente con lesiones neuromusculares sujetando objetos cilíndricos no mayores a 2 kilogramos. La estructura es, en su mayor parte, manufacturada a partir de prototipado rápido y es accionada a través de Bluetooth por medio de una aplicación móvil.
APLICACIÓN: Neurorehabilitación mediante interacción sujeto-máquina en tiempo real. Además permite almacenar parámetros como p.ej. posición, velocidad y fuerzas aplicadas para una mejor evaluación del paciente.
VENTAJA: Es funcional, ligero, portátil y puede ser fabricado rápidamente por impresion 3D (PLA).
DESVENTAJA: Al ser ligero puede ser frágil, no puede ser sobreesforzado, tiene un tamaño de estándar.

5. Diseño mecánico y primer prototipo de un robot de rehabilitación de mano.>
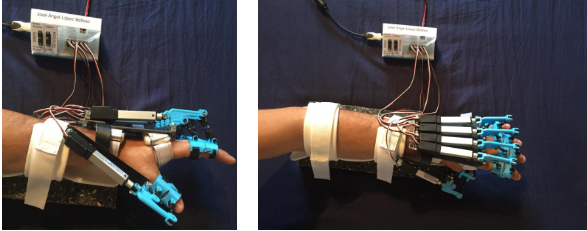
Se plantea el diseño mecánico, fabricación y construcción de un dispositivo mecatrónico tipo exoesqueleto de mano para su utilización en tareas de rehabilitación de mano, para personas que tienen discapacidad neuromotora, debido a que han sufrido daño cerebral adquirido.
VENTAJA: Las principales piezas son fabricadas en impresión 3D, movimiento automático, cómodo, software integrado.
DESVENTAJA: Dependiente de una fuente de poder grande, tamaño estándar.
6. Diseño de un dispositivo neumático para rehabilitación de mano mediante funda termoretráctil.>
Se presenta el diseño y construcción de un dispositivo para rehabilitación de falanges que realiza la extensión pasiva de falanges de miembro superior en una persona con lesión motora debido a un lesión cerebrovascular. El mecanismo es neumático y adaptable por lo que permite a los movimientos ser variados.
VENTAJA: Su diseño es económicamente viable, posee 5 grados de libertad en cada dedo, software especializado en rehabilitación, mecanismo termoretractil.
DESVENTAJA: Material, tamaños estandar, problemas al detectar el movimiento con la faja, no muy preciso.

7. Exo-Glove Poly
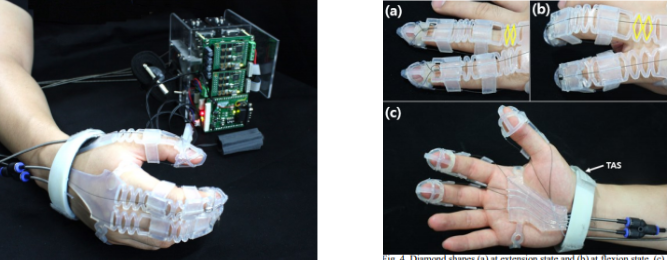
Es una mano robótica conducida mediante tendones basados en polímeros (Silicona), Exo-Glove Poly. Se desarrolló utilizando silicona para permitir la desinfección entre usuarios en entornos de usuarios múltiples, como hospitales. Exo-Glove Poly fue desarrollado para usar dos motores, uno para pulgar y el otro para el índice / dedo medio, y una mecanismo de baja actuación para captar varios objetos. En orden para realizar Exo-Glove Poly, características de diseño y fabricación procesos fueron desarrollados para permitir el ajuste a diferentes tamaños de mano, para proteger a los usuarios de lesiones, para permitir la ventilación, y para incrustar tubos de teflón para las rutas de cables.
VENTAJA: Fue fabricado por polímeros, permite la distribución de por los dedos, utiliza solo dos motores.
DESVENTAJA: Solo puede realizar flexión, no son portables debido al sistema de compresión de aire.
8. Tap
Es un teclado usable, portable que permite interactuar al usuario con los dispositivos conectados. Materiales usados: Skin-safe TPU | Braided Nylon Strap | PC+ABS
VENTAJA: Es inclusivo, ergonómico. Los materiales no irritan la piel.
DESVENTAJA: Costo alto





