PROPUESTAS DE SOLUCIÓN
I) Propuesta de solución N°1
Dispositivo de evaluación continua compuesta por 3 sensores de movimientos (posiblemente flexores), ubicados en la base de la articulación metacarpo-falange del segundo dedo, en el primer metacarpiano del primer dedo y en la falange proximal del primer dedo.
Con estos 3 sensores, obtendremos datos de los grados de movimientos (caracterizando los movimientos) realizados por estos dos dedos. Estableceremos rangos que serán comparados con los distintos valores detectadas por los sensores. Se comparará cada movimiento con los parámetros y se calificarán como PERJUDICIALES y NO PERJUDICIALES. Al identificar algún movimiento PERJUDICIAL se registrará y en caso de constante repetición del mismo movimiento se emitirá una alerta al usuario.
VENTAJAS: Viable, manufactura en gran variedad de materiales, portátil.
DESVENTAJAS: Requiere de un gran trabajo informático, no permite realizar todos los trabajos caseros durante su uso, estandarizado
II) Propuesta de solución N°2
Dispositivo basado en 3 conceptos: Rehabilitación, prevención y complementación
Se trata de una órtesis articulada, la cual mantiene rígido el pulgar y limita el movimiento de abducción y extensión. Esto previene lesiones y los movimientos repetitivos que conllevarían a una eventual recaída.
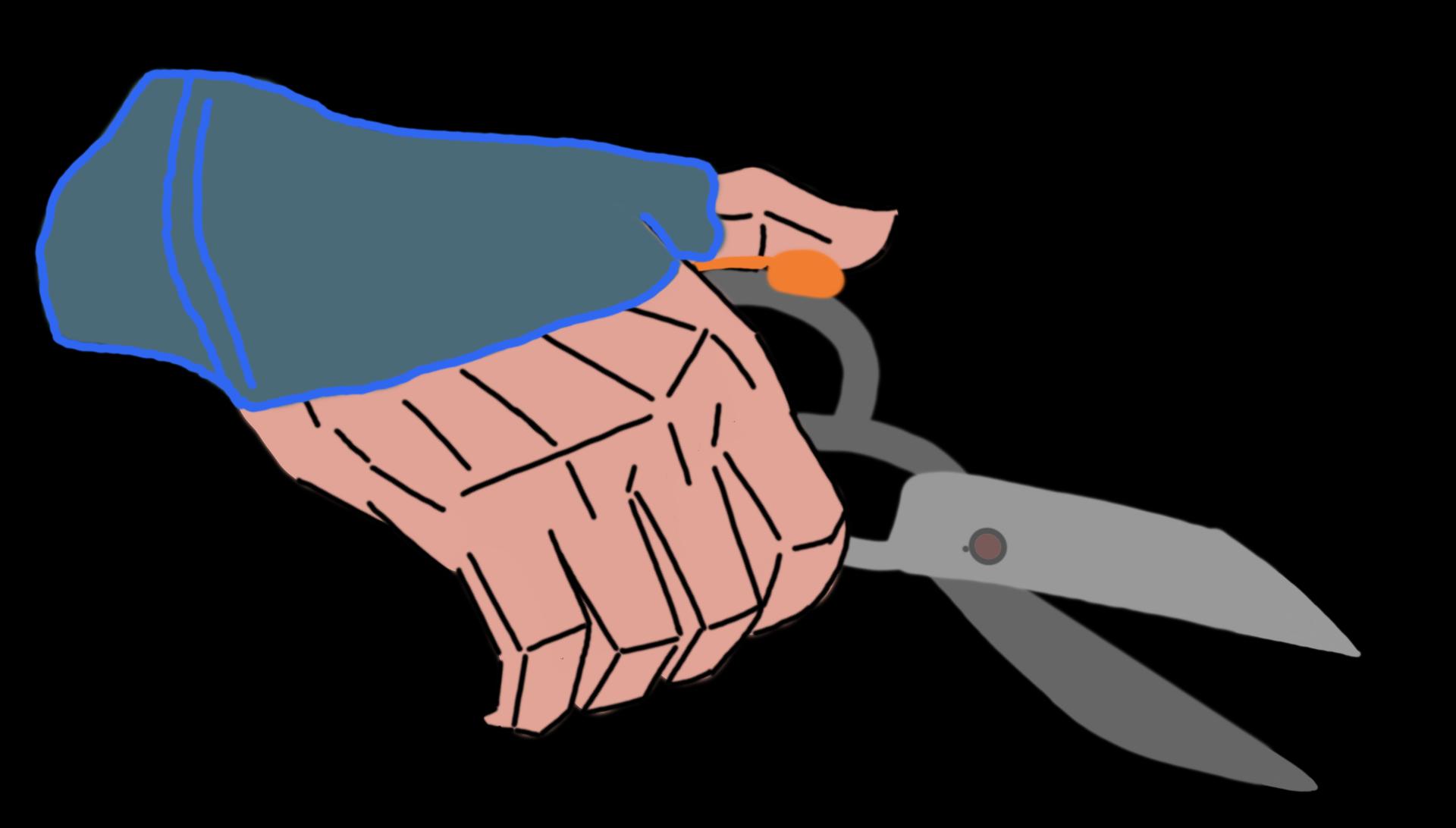
Así mismo brindaría asistencia en el uso de tijeras al contar con 2 soportes ubicados en el pulgar (un resorte conectado a la parte del guante ubicado en la palma de la mano) y en los 4 dedos (ver Figura 1). Para dar movimiento a las tijeras usamos el resorte del soporte del pulgar el cual reemplaza el movimiento de abducción del dedo pulgar. Los 4 dedos restantes son los que generan la fuerza para mover las tijeras, para evitar lesiones el guante cuenta con una cuerda motorizada que genera la fuerza necesaria para mover los dedos.
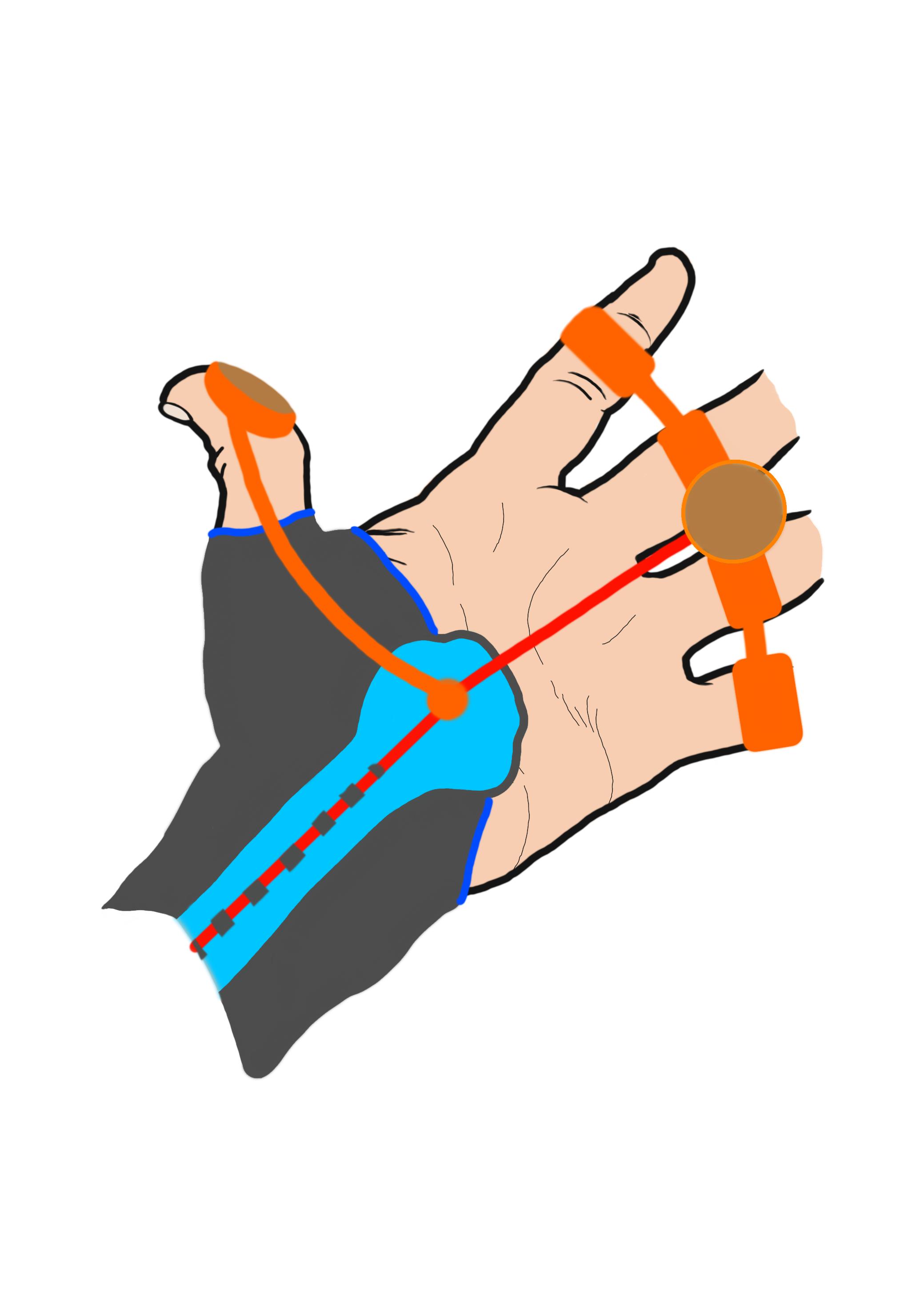
Figura 1
Funcionamiento
III) Propuesta de solución N°3
Dispositivo biomecánico de miembro superior a modo de guante basado en fuentes de fuerza interna ; dicha fuerza es generada por el tercer, cuarto y quinto dedos; con finalidad de generar fuerza mecánica, esta se utilizará para realizar movimientos de aducción y extensión pudiendo así hacer posible el uso de tijeras de corte, a su vez limita movimientos metacarpofalángico del primer dedo que conlleven el uso de los ligamentos implicados.
VENTAJAS: Autónomo por ser netamente mecánico.
DESVENTAJAS: Movimientos reducidos, fuerza limitada a la fuerza mecánica ejercida por el mismo usuario.




